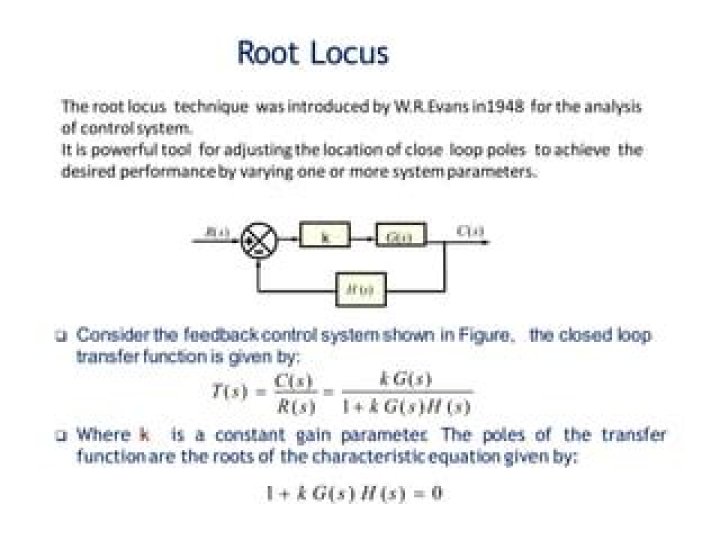
How does gain affect root locus
By Christopher Green
In his case, you are actually plotting two root locus plots on the axes. One is the original of the system, the other of the negative of that system. … If you want positive and negative gains for a system, you can pass in a specific vector of gains as the 2nd argument to ‘rlocus’.
Can gain be negative in root locus?
In his case, you are actually plotting two root locus plots on the axes. One is the original of the system, the other of the negative of that system. … If you want positive and negative gains for a system, you can pass in a specific vector of gains as the 2nd argument to ‘rlocus’.
How does gain affect pole location?
You can see that, as the gain changes from 0 to infinite, the closed-loop poles location moves from the open-loop poles towards the open-loop zeroes. … Actually, your opinion represents what used to be the general engineering opinion: if you increase the gain, you affect the stability, so better use low-gains.
How do you find gain with root locus?
- The loop gain is KG(s)H(s) which can be rewritten as KN(s)/D(s).
- N(s), the numerator polynomial, is mth order; D(s) is nth order:
- K>0, a0>0, b0>0.
- N(s) has zeros at zi (i=1.. …
- The difference between n and m is q, so q=n-m.
What is critical gain in root locus?
Using a design technique such as root locus, the critical gain is the gain of the system at which the root locus path intersects the imaginary axis (or the unit circle in discrete domain). In other words, this is the gain that puts the system on the verge of instability.
For what value of gain is sa point on the root locus?
1. What is a root locus?1. The plot of a system’s closed-loop poles as a function of gain3. If , for what value of gain is s a point on the root locus?3. K = 1/54. Do the zeros of a system change with a change in gain?4. No
What is a root locus plot?
– The Root Locus Plot is a plot of the roots of the characteristic equation of the closed-loop system for all values of a system parameter, usually the gain; however, any other variable of the open- loop transfer function may be used.
How does gain affect control systems?
Gain is a proportional value that shows the relationship between the magnitude of the input to the magnitude of the output signal at steady state. … However, increasing gain or decreasing gain beyond a particular safety zone can cause the system to become unstable.Is K the gain?
5.6. The proportionality factor K is called proportional gain. The constant M is known as the controller bias, because it represents the magnitude of the correction signal when no correction is needed (e=0). … The magnitude of the corrective action is reduced as the controlled variable approaches the set point.
How does gain affect transfer function?The transfer function gain is a parameter that connects the steady-state conditions and stability with the transfer function. It is the ratio of what you receive from the system as output to what you input to the system, under steady-state condition.
Article first time published onWhat if the gain of the system is increased?
All the root loci start from the poles where k (gain) = 0 and terminates at the zeros where K tends to infinity. Hence, on increasing the gain of the system the roots move away from the open-loop poles towards the zeros or infinity.
How does root locus determine stability?
The root locus procedure should produce a graph of where the poles of the system are for all values of gain K. When any or all of the roots of D (denominator) are in the unstable region, the system is unstable. When any of the roots are in the marginally stable region, the system is marginally stable (oscillatory).
How does Matlab determine settling time from root locus?
In the Step Response plot, the settling time is around 0.05 seconds. To verify the exact settling time, right-click the Step Response plot area and select Characteristics > Settling Time. A settling time indicator appears on the response plot.
For what value of the gain K would the closed loop system become marginally stable?
If K < 1386, the system will remain stable. If K > 1386, the system will remain unstable. the even polynomial has no unstable roots, only jω roots, therefore the system is marginally stable when K = 1386.
Why root locus technique is necessary?
Advantages of Root Locus Technique. Root locus technique in control system is easy to implement as compared to other methods. With the help of root locus we can easily predict the performance of the whole system. Root locus provides the better way to indicate the parameters.
Why is the root locus important?
The root locus plot gives us a graphical way to observe how the roots move as the gain, K, is varied.
What is gain margin and phase margin?
The gain margin is the factor by which the gain must be multiplied at the phase crossover to have the value 1. The phase crossover occurs at 0.010 Hz and so the gain margin is 1.00/0.45=2.22. The phase margin is the number of degrees by which the phase angle is smaller than −180° at the gain crossover.
Do zeros change with change in gain?
A plot of the possible closed-loop pole locations as some parameter varies from 0 to ∞. 4. Do the zeros of a system change with a change in gain? No.
How can one tell from the root locus that the settling time does not change over a region of gain?
If the system has its poles in the right half of the s plane then the system is unstable. How can you tell from the root locus if the settling time does not change over a region of gain? … Since the center of asymptotes shifts towards the left with the effect of open loop zeros this increases the ζωn and ζ and reduce ωd.
When gain K of the open loop transfer function order greater than unity is varied from zero to infinity closed loop system?
When the gain K of the open loop transfer function is varied from zero infinity, the closed loop poles may cross the jω axis and go right half of the s-plane for certain values of K and the system becomes unstable.
What is P gain?
What is the P gain. The P gain stands for Proportional. This is the gain that applies to how much we are out-of level. If we are level, then each motor is driven with the current throttle position (T). If we are 1 degree out of level, then each motor is driven with T + (P * 1).
What is the gain expression at DC?
DC gain is the ratio of the magnitude of the response to the steady-state step to the magnitude of the step input. The final value theorem demonstrates that DC gain is the value of the transfer function assessed at 0 for stable transfer functions.
Why is steady state gain important?
The gains intrinsic to the measuring device (transmitter), final control device (e.g. control valve), and the process itself are all important in helping to determine the necessary controller gain to achieve robust control.
Can DC gain be infinite?
gain = output voltage / input voltage. dc = constant voltage level. output of the integrator goes infinite when a constant input voltage is applied –> gain = infinite / input voltage = infinite.
When the gain of a system is increased the steady state error?
As the proportional gain constant Kp increases, the steady-state error decreases. However, the steady-state error is never zero. 2. Thus, for Kp = 0.1, the time constant decreases to τ = 8.33 s.
What is the effect of increasing the proportional gain?
In general, increasing the proportional gain will increase the speed of the control system response. However, if the proportional gain is too large, the process variable will begin to oscillate.
What is the effect of adding gain to the closed loop system?
Effect of Feedback on Overall Gain From Equation 2, we can say that the overall gain of negative feedback closed loop control system is the ratio of ‘G’ and (1+GH). So, the overall gain may increase or decrease depending on the value of (1+GH). If the value of (1+GH) is less than 1, then the overall gain increases.
What is gain in a PID loop?
Gain is the ratio of output to input—a measure of the amplification of the input signal. … The three primary gains used in servo tuning are known as proportional gain, integral gain, and derivative gain, and when they’re combined to minimize errors in the system, the algorithm is known as a PID loop.
Is gain of the system is zero then the roots?
Explanation: The roots of the system in s plane coincides with the poles if the gain of the system is reduced to a value zero. Explanation: The system can become stable by reducing the damping and also by adding zeroes in the s plane and moving left of the s plane system becomes more stable.
How do you find the gain margin and phase margin of a root locus?
The gain margin will be given by the point where the root locus crosses the imaginary axis in the complex plane. The phase margin is associated with the place where the root locus has a magnitude of one, and the damping ratio is equivalent to the cosine of the angle of the poles.
What is the effect of addition of poles on root locus?
The effect of addition of pole becomes more pronounced as pole location drifts away from imaginary axis. Addition of right half pole will make overall system response to be less stable.